



-
全球导航卫星系统(GNSS)是指能在地球表面或近地空间任何地点为用户提供全天候3维坐标、速度和时间信息的空基无线电导航定位系统。除了大家熟知的美国GPS外,还包括俄罗斯的GLONASS、欧盟的GALILEO和中国北斗(以下简称BDS)等4大全球系统。自2013年后的中高端智能手机不但具有GPS,也有BDS、GLONASS和辅助全球导航卫星定位系统(AGNSS)等定位模式,极大地便利了导航定位,故倍受百姓推崇。现在很多智能手机用户都认为定位数据只要与地图(百度、高德、谷歌等)匹配良好就表明绝对定位精度高,实际这是一个严重误区,如国内App通常是通过高德、百度等第三方SDK接口获取定位信息,因此在定位能力和精度上会有所差异[1-2]。再如在GNSS卫星信号弱、WIFI数据库陈旧、临时移动基站区域,定位精度就会有较大偏差。实际上智能手机在典型应用场景中(如沿路导航)会采用软件算法对硬件定位结果进行纠偏,即把定位结果强行切换到对应场景的位置(如默认行驶中的车辆在正确行驶的车道上),给人造成定位很准(在对应场景内)或者定位很差(不在对应场景内)的错觉。
森林资源调查与管护对导航、定位和面积量算有多种需求。主要表现在森林种类、分布、立地条件、生长状态等纷繁复杂,其次管护要求也千差万别,导致定位设备应用场景和技术要求复杂多样且参差不齐。在智能手机出现之前,林业的GNSS技术应用主要依靠专业(或工业)级设备完成。专业和民用(或商用)级设备的主要差异表现在两个方面,一是三防(防水、防尘、防摔)性能,二是GNSS模块性能差异导致的定位精度不同。民用级产品是为良好工作环境和定位精度要求不高的应用场景设计,而专业级产品则是为野外恶劣环境且对定位精度有一定要求的复杂作业条件而定制。就GNSS技术在林业中应用来说,所谓简单场景是指如新造林地、沙漠灌木林、林间开阔地等植被高度低于1 m的林地环境,复杂场景是指林冠遮天蔽日、山高坡陡的乔木林、灌木林环境,因为树叶、枝条和树干等对卫星信号会产生极大的干扰,从而严重影响GNSS接收机的定位导航性能[3-9]。
国外就森林环境中GNSS的定位精度开展过很多研究,如Christopher Deckert等[10]就在不同地形(山脊、山坡、沟谷)条件下的针叶林和阔叶林林分中,测试了差分GPS平面定位精度的变化规律,结果表明针叶林(5.6 m)比阔叶林(4.2 m)定位精度低,且从山脊到沟谷误差逐渐增大;Galán Ordonez等[11]认为林冠或林分参数对GNSS信号有很大影响,并建立了基于递归神经网络的数学模型,研究了观测误差、卫星信号和林分参数的关系。国内就GNSS接收机在林业应用中受复杂多变地形、山体影响卫星图形分布、树冠阻挡或削弱卫星信号强度等现实问题,也进行了许多研究,认为树木对卫星信号的阻隔程度小于建筑物[12],观测精度随着林分郁闭度的升高会降低,在山谷等更恶劣地形中有时都得不到浮动解,或根本无法定位[4],并构建了林冠开阔度这个指标参数来反映森林的定位环境条件,它与卫星数和信噪比呈显著正相关[5],并认为若要在林地中实现精准定位必须采用差分定位技术[6],林下BDS/GPS双模定位精度较单GPS模式在X、Y、Z方向分别可提高大约1.8、1.7和3.2 m[13]。
近十多年来,涌现出许多具有定位能力的民用级产品,极大方便和丰富了林业用户选型,提高了工作效率和资源监管水平,但也给GNSS技术的林业应用带来很多思想上的“混乱”。由于森林多分布于山高坡陡、人迹罕至的边远地区,为了更科学掌握民用和专业级定位设备的差异与适宜性,本研究通过乔木林林分中数据的采集和分析来科学阐明其定位精度差异,以指导林业调查人员终端设备选择和GNSS技术的科学应用。
HTML
-
Honor 8是2016年7月华为公司发布的产品,采用Android 6.0操作系统,是一款支持4G网络的八核智能手机,定位模组支持GPS/BDS/GLONASS/A-GNSS,卫星信号接收采用商用面状贴片天线。
-
G138BD(以下简称138)是北京合众思壮公司于2015年推出可兼容BDS/GPS/GLONASS卫星接收于一体的通用北斗手持终端,干电池/锂电池/USB 3种供电模式随意切换,解决不同工作环境下电源需求。工业三防设计、坚固耐用,防护等级IP67,抗1.5 m自然跌落,完全适应各种野外工作环境。卫星信号接收采用专业面状陶瓷天线。
-
山西省关帝山国有林管理局二道川林场有不同坡度、坡向、坡位、中高郁闭度(0.5~0.8)的油松(Pinus tabuliformis Carr.)和辽东栎(Quercus liaotungensis Koidz.)分布,林下有杂灌和草本覆盖,测试设备放置于树冠正下方的地面。林间外业数据采集于2019年6月12—15日,工作时间为每天9:00—20:00,定位数据获取时长分别为1 min、5 mins和10 mins,定位模式全部为多模状态,两种设备同步采集NMEA格式数据,用以提取经纬度、高程、卫星数量、信噪比、PDOP、HDOP、VDOP等因子,位置更新率为1 Hz。点位真值来自千寻网的RTK数据。
-
共布置样地27块,其中22块为有通讯(移动、电信、联通)信号的针叶林林分,5块为通讯盲区的阔叶林林分。其中前者用于含AGNSS模式分析,后者用于纯GNSS模式分析。
1.1. 设备性能及其型号
1.1.1. 民用级测试设备—-华为Honor 8
1.1.2. 专业级对照设备—合众思壮G138BD
1.2. 试验设计
1.3. 样地信息
-
为了真正模拟民用机日常定位应用习惯,本次林间测试Honor 8也开启了AGNSS功能。测试分析专门编制了专用模块工具从NMEA 0183相关语句中解析经纬度、高程、DOP、信噪比等8个参数,并把经纬度值转化为UTM 3度带平面坐标,还计算了点位误差、极值等分析指标。
-
对两种设备多模状态连续采集的1 min观测误差(60个数据)分别计算了平均值,并提取了极值,对比结果见表1和表2。
样地号
PlotsΔX/m Δy/m ΔminX/m ΔmaxX/m ΔminY/m ΔmaxY/m ΔH/m Honor 8 138 Honor 8 138 Honor 8 138 Honor 8 138 Honor 8 138 Honor 8 138 Honor 8 138 1 1.82 0.67 1.96 1.15 −1.35 0.56 9.00 1.85 −0.76 −0.60 4.33 2.06 31.46 1.44 2 −1.86 0.27 9.60 1.98 7.59 −0.16 12.70 3.53 −2.71 −0.71 −0.67 1.38 37.62 −9.42 3 3.77 −1.62 −4.84 −1.35 −9.23 −2.11 3.89 −0.26 2.10 −3.00 6.19 −0.19 21.67 9.24 4 6.95 5.92 1.58 5.40 1.58 2.14 1.58 7.85 6.95 4.22 6.95 6.92 22.73 −1.10 5 −0.94 2.23 −1.21 0.33 −5.79 −1.19 1.20 1.02 −2.97 1.60 2.24 3.38 −3.25 −0.51 6 2.89 1.82 0.36 0.22 −2.18 −0.20 5.50 1.12 0.14 0.20 11.53 3.29 18.93 4.24 7 6.36 0.27 −1.70 0.84 −3.15 −0.84 −0.08 1.37 4.10 −0.65 8.55 2.31 8.99 6.87 8 4.16 4.99 −0.63 −0.97 −5.19 −2.14 1.77 −0.10 −0.04 4.25 14.76 5.86 30.89 3.94 9 1.41 −0.11 2.73 5.12 −6.12 3.65 7.05 7.15 −0.11 −1.27 6.23 1.85 7.32 −8.49 10 −5.39 5.34 −3.31 3.34 −3.31 1.92 −3.31 5.24 −5.39 4.08 −5.39 6.31 13.35 9.06 11 −7.34 −0.81 −8.62 −1.53 −9.95 −3.01 −7.03 −0.92 −9.20 −4.24 −4.57 2.08 19.92 5.86 12 3.30 4.15 −2.71 4.15 −5.62 1.33 1.00 6.39 −0.47 −0.51 10.60 6.96 7.81 9.70 13 2.93 0.39 −0.25 2.42 −0.87 1.71 0.90 3.19 1.79 −0.57 4.80 1.20 22.86 −1.83 14 −8.00 −1.22 −1.31 2.75 −5.64 0.55 2.16 3.55 −18.39 −2.82 −4.37 1.00 −7.78 −4.85 15 −0.09 −5.42 5.01 4.78 −1.00 2.33 10.61 6.21 −2.49 −5.78 4.86 −5.01 4.68 −3.47 16 4.16 0.23 0.25 −1.06 −3.04 −1.36 2.69 −0.43 1.44 −0.72 6.41 1.04 8.04 0.18 17 1.67 −0.58 −1.86 2.55 −4.72 1.33 0.96 3.01 −1.09 −1.54 3.19 0.08 10.23 −1.84 18 −0.43 −4.36 −5.32 0.18 −7.04 −0.82 −0.93 1.20 −3.20 −5.13 3.05 −2.16 19.95 −0.22 19 0.41 2.09 4.21 1.93 2.57 −2.75 6.40 3.92 −1.91 1.32 1.20 2.59 6.57 1.26 20 0.00 −1.87 1.10 1.67 −1.37 1.30 4.01 2.62 −2.09 −3.74 2.52 −0.79 13.44 0.39 21 2.13 0.44 −1.48 2.86 −1.49 0.05 −0.90 8.61 2.11 −1.97 2.71 6.66 15.70 0.29 22 0.76 1.73 2.91 −1.40 −0.19 −1.67 6.51 −1.10 −0.64 0.83 2.49 2.30 9.07 1.76 |max| 8.00 5.95 9.60 5.40 9.95 3.65 12.70 8.61 18.39 5.13 14.76 6.96 37.62 9.70 Table 1. Comparison of average errors of position information in 1 min
样地号
Plots卫星数量/颗
Satellite numbersPDOP HDOP VDOP 信噪比
Signal to noise ratioHonor 8 138 Honor 8 138 Honor 8 138 Honor 8 138 Honor 8 138 1 18.42 18.51 2.20 1.38 1.12 0.81 1.88 1.10 24.70 34.24 2 16.97 21.14 1.91 1.20 1.08 0.74 1.56 0.91 27.13 36.68 3 19.37 11.00 1.75 2.09 1.05 1.20 1.44 1.65 25.73 34.63 4 19.85 10.14 1.56 1.96 0.97 1.07 1.18 1.60 26.72 36.39 5 20.75 19.32 2.10 1.30 0.94 0.70 1.86 1.10 25.15 32.91 6 13.42 16.73 51.34 1.58 36.01 0.80 36.52 1.30 28.42 33.02 7 19.07 23.69 1.79 1.49 1.09 0.91 1.41 1.12 23.45 31.36 8 16.97 13.54 3.02 3.04 1.26 1.60 2.69 2.58 25.96 33.54 9 15.27 17.69 36.30 1.84 24.66 0.98 26.30 1.51 27.71 32.66 10 21.00 9.44 1.56 2.25 0.97 1.24 1.19 1.85 23.68 32.59 11 18.56 12.07 1.97 3.25 1.15 1.56 1.60 2.79 24.91 31.46 12 19.93 11.39 2.07 2.13 1.06 0.99 1.81 1.85 25.24 33.15 13 17.17 11.49 1.80 3.52 0.91 1.65 1.53 3.06 27.24 33.93 14 19.73 15.10 1.52 1.59 0.85 0.84 1.27 1.32 24.39 30.75 15 17.12 18.76 1.93 2.21 1.15 1.07 1.56 1.89 25.79 33.57 16 19.37 14.29 1.64 2.66 0.90 1.34 1.39 2.24 25.29 33.27 17 18.95 22.47 1.51 1.33 1.02 0.86 1.09 0.99 23.54 32.91 18 19.46 13.76 1.51 1.73 0.96 1.16 1.15 1.25 24.10 33.40 19 19.83 11.51 1.61 3.16 0.97 1.96 1.29 2.43 25.60 34.33 20 20.80 13.58 1.58 1.84 0.91 1.09 1.30 1.40 26.02 33.16 21 17.46 20.42 2.00 5.02 0.96 4.22 1.80 4.70 28.98 36.03 22 17.15 27.64 1.59 1.21 0.93 0.69 1.33 0.96 29.80 36.95 |max| 21.00 27.64 51.34 5.02 36.01 4.22 36.52 4.70 29.80 36.95 Table 2. Comparison of average values of GNSS signal parameters in 1 min
表1的1 min平均误差值表明了在22个不同立地和森林条件的样地中,尽管Honor 8有AGNSS信号的强力支持,但总体定位精度仍是138优于Honor 8,平面误差Honor 8约为10 m而138在6 m以内,高程误差Honor 8在38 m以内而138在10 m以内,当然在个别点位Honor 8误差也会小些。
尽管Honor 8是全模(北斗/GPS/GLONASS/GALILEO/QZSS/IRNSS/AGNSS),而138为多模(北斗/GPS/GLONASS)状态,但表2表明Honor 8的卫星数量仍总体低于138,平均差近7颗。在第6和第9号样地处由于Honor 8为无固定解的状态(占总样地数的9%),故3个精度因子指标都非常高,总体的DOP(精度因子)平均值也是138优于Honor 8;信噪比数据的对比更为突出,138全部优于Honor 8,数值从5~10不等,平均差异是7.79。表明这两种类型终端设备对卫星信号的敏感度有着明显差异。
同时还计算了8个观测参量1 min数据的标准差,结果对比见表3。
样地号
PlotsX/m Y/m H/m 卫星数量/颗
Satellite numbersPDOP HDOP VDOP 信噪比
Signal to noise ratioHonor 8 138 Honor 8 138 Honor 8 138 Honor 8 138 Honor 8 138 Honor 8 138 Honor 8 138 Honor 8 138 1 2.01 0.84 3.56 0.38 17.63 3.32 1.98 0.56 0.21 0.02 0.04 0.02 0.25 0.00 1.57 0.88 2 0.59 0.48 1.26 0.97 1.77 0.85 2.02 1.33 0.08 0.02 0.04 0.02 0.05 0.03 1.03 0.83 3 1.02 0.86 2.86 0.49 1.36 3.09 1.38 0.00 0.07 0.39 0.07 0.13 0.08 0.39 1.24 0.39 4 0.00 0.59 0.00 1.75 0.49 1.49 1.27 0.68 0.07 0.07 0.06 0.12 0.06 0.00 1.04 1.06 5 2.09 0.41 2.80 0.57 1.94 0.87 1.56 1.38 0.33 0.01 0.10 0.01 0.35 0.00 1.25 1.69 6 2.04 1.12 1.17 0.34 3.84 2.19 4.00 0.63 65.91 0.01 46.83 0.01 46.45 0.00 2.97 0.59 7 1.49 0.84 0.82 0.46 0.61 1.77 0.78 2.22 0.19 0.05 0.06 0.04 0.20 0.04 1.40 0.87 8 4.20 0.55 2.34 0.49 2.47 0.61 4.44 0.85 1.05 0.01 0.10 0.01 1.11 0.04 2.00 0.60 9 1.22 0.89 3.78 1.32 14.90 2.45 3.82 1.88 58.19 0.21 41.49 0.14 41.01 0.17 1.81 0.73 10 0.00 0.66 0.00 1.20 0.27 0.52 1.22 0.91 0.15 0.40 0.16 0.22 0.09 0.35 1.16 1.44 11 1.29 2.18 0.71 0.58 1.60 3.37 0.98 1.40 0.29 0.20 0.23 0.08 0.17 0.20 1.08 1.34 12 3.30 2.52 1.89 1.78 0.24 2.85 1.23 0.58 0.06 0.15 0.09 0.07 0.09 0.15 1.00 2.83 13 0.67 0.60 0.36 0.43 0.91 2.28 2.61 0.77 0.13 0.36 0.10 0.22 0.08 0.28 1.15 0.82 14 3.43 1.35 2.45 0.94 0.55 2.27 1.04 0.75 0.09 0.05 0.06 0.04 0.11 0.04 1.08 0.72 15 2.16 0.27 3.55 1.18 0.35 1.50 1.35 1.72 0.24 0.04 0.14 0.03 0.20 0.04 1.28 0.79 16 1.65 0.49 1.44 0.33 0.46 1.46 1.25 1.62 0.05 0.05 0.00 0.03 0.03 0.07 1.76 0.61 17 1.64 0.48 1.70 0.54 0.23 1.35 1.05 2.27 0.11 0.11 0.11 0.07 0.03 0.10 1.99 1.53 18 2.56 0.68 2.14 0.53 0.40 1.05 1.64 1.69 0.04 0.25 0.07 0.20 0.05 0.16 1.37 0.70 19 0.89 0.28 1.25 2.06 0.50 3.88 2.57 1.74 0.19 0.45 0.12 0.19 0.18 0.45 1.63 0.87 20 1.56 1.01 1.85 0.32 0.27 0.58 1.39 0.49 0.09 0.00 0.03 0.00 0.11 0.00 1.01 1.34 21 0.09 1.02 0.09 0.99 0.49 2.20 1.89 1.39 0.00 17.79 0.05 17.94 0.00 17.66 1.09 1.99 22 0.92 0.43 2.26 0.15 0.19 0.23 1.49 2.71 0.14 0.07 0.05 0.04 0.11 0.05 1.35 0.28 |max| 4.20 2.52 3.78 2.06 17.63 3.88 4.44 2.71 65.91 17.79 46.83 17.94 46.45 17.66 4.20 2.52 Table 3. Comparison of Standard Deviation of GNSS observation variables in 1 min
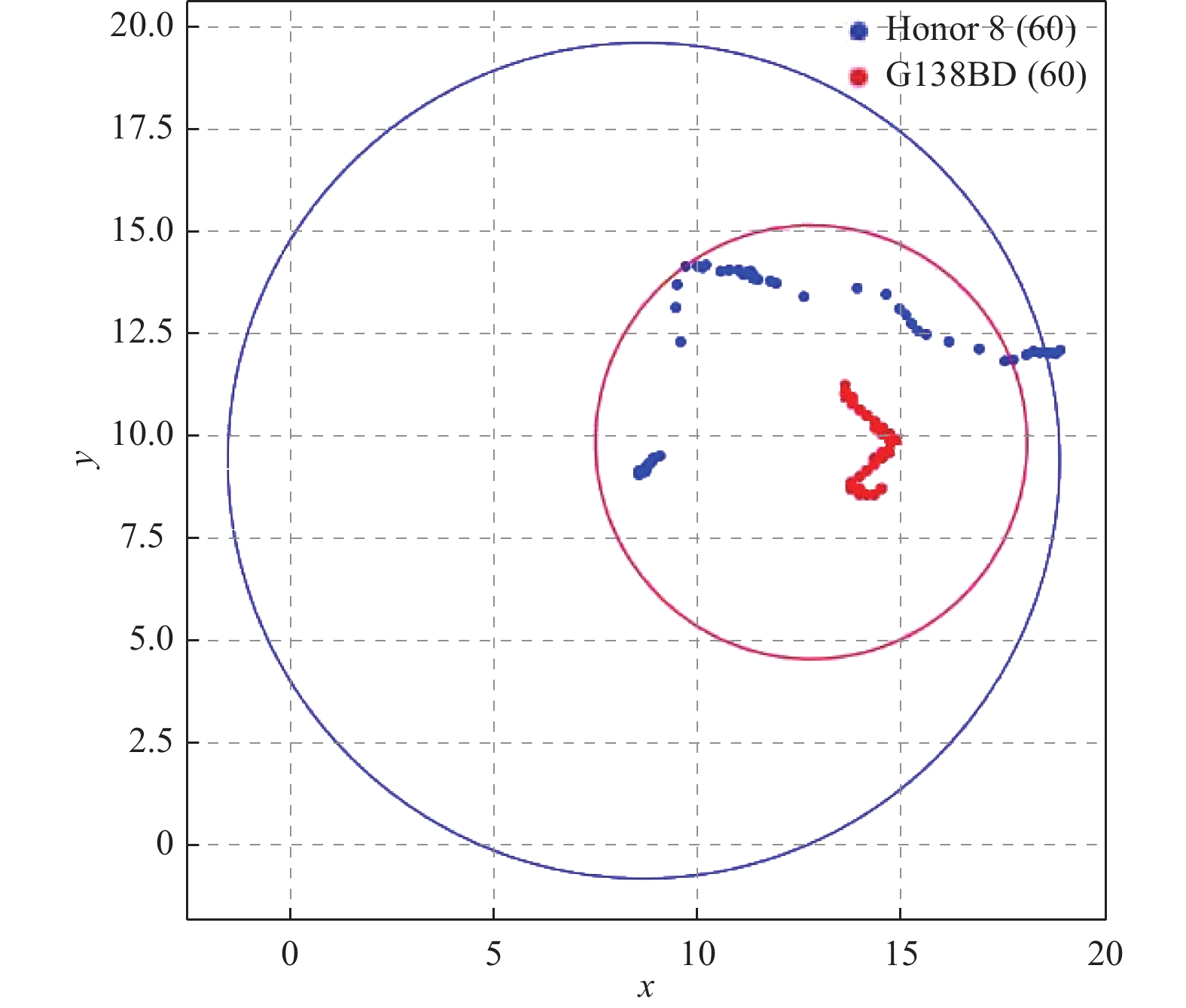
由此看来所有样地8个分析指标的标准差总体也是Honor 8高于138,表明前者的离散性更强。图1是两种设备1 min数据的轨迹和相位图,138(专业设备)明显稳定性更好,其根本原因是专业和商用面状天线的性能差异所致。

Figure 1. Positioning track maps of two devices in 1 min (NO.1 plot)
-
在无任何通讯信号的偏远辽东栎林分中共布置5个样地,主要位于山脊两侧的南北坡位置,树高约10 m,树龄约50 a。由于无法收取RTK数据,故没有真值,主要用两种设备的差值表述其定位性能的差异性,每点观测时长10 mins,观测数据总计为3 000个,所有观测值的平均值见表4。
样地号Plots 23 24 25 26 27 Honor 8 138 Honor 8 138 Honor 8 138 Honor 8 138 Honor 8 138 ΔY/m −6.98 0.18 4.33 −0.33 −4.29 ΔX/m −4.39 −1.45 2.32 1.22 −4.42 ΔH/m 10.68 −3.89 −8.68 −10.24 −1.42 卫星数量/颗
Satellite numbers17.82 12.04 16.68 13.43 18.87 16.06 16.82 22.43 17.66 23.93 PDOP 2.42 1.99 1.94 1.53 1.97 1.41 2.04 2.31 2.35 1.38 HDOP 1.54 1.21 0.97 0.84 1.06 0.90 0.98 1.61 1.30 0.75 VDOP 1.86 1.51 1.68 1.22 1.65 1.03 1.78 2.04 1.93 1.10 信噪比
Signal to noise ratio24.21 28.37 26.58 35.60 30.24 35.16 26.38 37.22 26.01 34.20 Table 4. Comparison of average values of GNSS observation variables in 10 mins
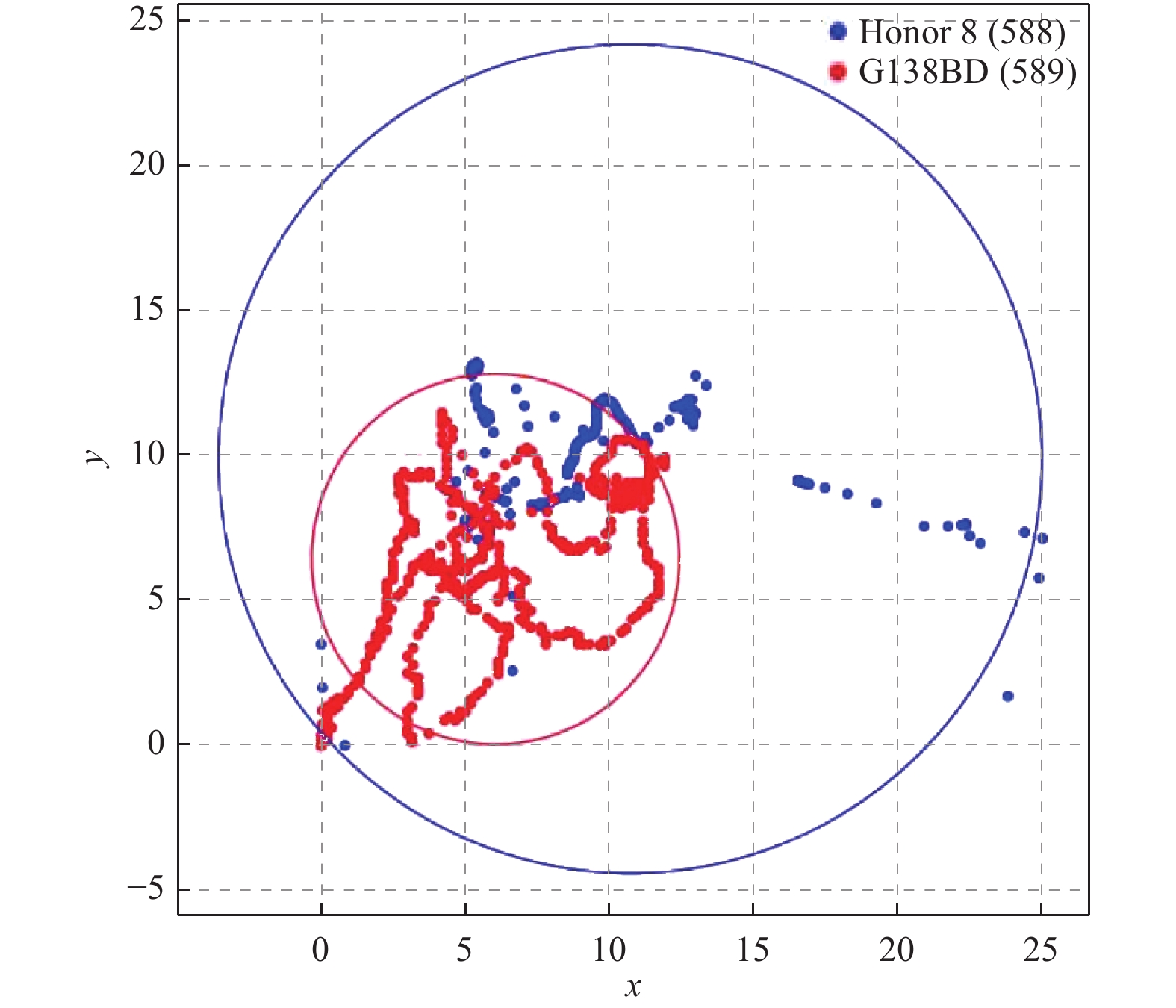
由表4可以看出,如果没有AGNSS支持,在观测时长为10 mins内138(专业终端)信噪比平均值明显高于Honor 8(民用终端),DOP值也同样。两者平面位置和高程差异分别在5 m和10 m左右,与前面针叶林分分析结果一致。图2是两种设备10 mins数据的轨迹和相位图,再次表明专业设备的可靠性更好,专业和民用型面状天线的性能差异直接关联着定位性能。
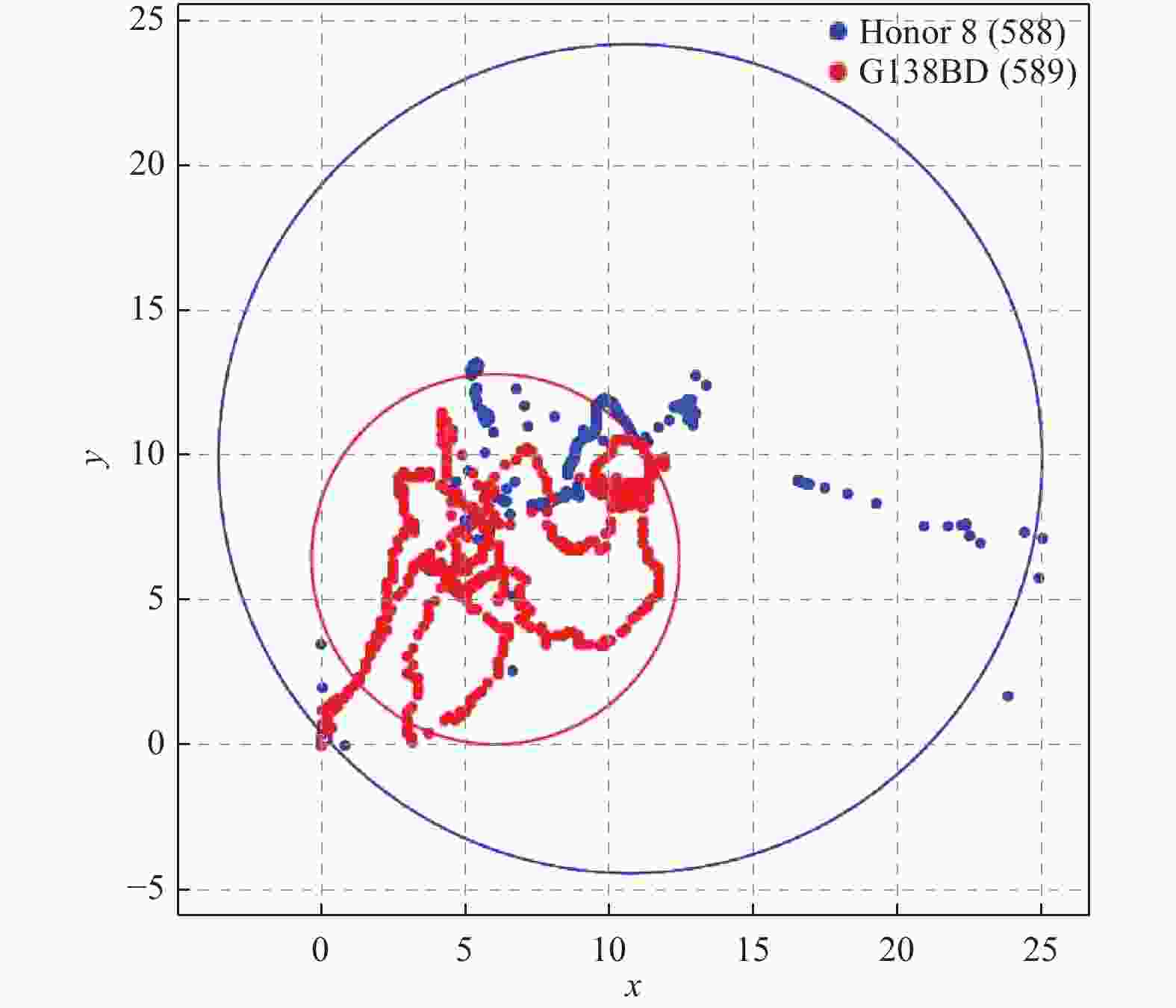
Figure 2. Positioning track maps of two devices in 10 mins (NO.23 plot)
综合指标表明专业机的定位性能优于民用机,即在定位精度要求优于10 m时必须选择专业设备。
2.1. 含AGNSS定位模式的精度分析
2.2. 单GNSS定位模式的精度分析
-
森林环境千差万别,有郁郁葱葱的乔木林,也有荒原上的稀疏灌木林。本研究主要探讨中等以上郁闭度乔木林分中树叶、树枝和树干等多路径效应以及天线类型对定位精度的影响,结果表明在茂密的森林中,民用级产品与专业级产品的定位精度存在差异,用户需根据作业要求和工作场景,合理选择设备,以保证数据采集的准确性和科学性。
-
林业外业调查等业务对导航定位有着多样化技术需求,在乔木林环境中智能手机的DOP值、信噪比等卫星信号性能指标总体低于专业产品,有时甚至无法获得固定解导致定位的巨大误差。因为虽然民用机和专业机都采用面状GNSS天线,但民用机(如智能手机)的GNSS天线通常采用独立的FPC方式或与WIFI、蓝牙共用方式,以适应配线密度高、重量轻、厚度薄、弯折性好的技术要求,天线采用无源增益,由于超薄且拥挤导致稳定性相对较差;而专业机采用相对大而厚的专业小型面状陶瓷天线,虽也有方向性特点,但空间稍大增强了稳定性,且除无源放大增益外,还有有源二级放大增益,灵敏度更高,从而保障了GNSS信号的强度。
-
在实际工作中由于主客观条件所限但又希望获得米级高精度定位数据时,可以采用一定时长的单点求平均方法来实现精度最优化目标。因为在林间树冠、树枝等对卫星信号有着复杂影响,会导致信号的很多不确定性与离散性,只有当DOP值趋于稳定后才可获得最佳的定位数据。专业手持机多数情况下累积观测1 min以上且取平均值时可以满足水平方向约5 m的高可靠性定位精度要求。
-
专业(或工业)级产品三防性能好,不仅防水防尘防跌落,更是在极端温、湿度等恶劣环境下仍能够保持正常工作,如屏幕在高亮环境仍清晰可见,电源可以保证16 h满负荷工作,这些特性都是野外森林环境工作的重要保障条件。通常民用型设备只是为室内或理想工作场景设计,为降低成本不会选择高端专业元器件,故复杂森林环境中的位置服务或者林下优于10 m的绝对定位精度需求须选择专业终端设备来完成。
致谢:山西省林业有害生物防治检疫局关帝山分局和山西省关帝山林业管理局二道川林场对野外工作给予了大力支持,相关人员全程参与了数据采集,在此表示衷心感谢!
 DownLoad:
DownLoad: